





亞洲指標移動產業盛會 AI自駕、氫能技術成焦點
一文看懂自駕車:在路上跑的超級電腦
鉅亨網編譯陳達誠
每輛汽車約由 3 萬個零組件所構成,整個汽車產業如同金字塔般,頂端為汽車製造商,在其下方則有無數的零件製造商。如何從大量的零件供應鏈找出最合適的產品並加以搭配組合,就是各家汽車製造商的獨門絕活。
那麼,被稱為「在路上跑的超級電腦」的自駕車又是什麼情況呢?如果將自駕車拆解,大家將會發現其中充滿了各家新創企業的智慧結晶。
自駕車為了隨時掌握周遭的狀況,集結了各式各樣的尖端科技在其中。而著手研究這些科技的企業除了汽車製造商與他們的協力廠商外,還有許多獨自研發自駕科技的企業存在。例如美國的 Zoox 和 Nuro 就是個例子。
此篇內容著重在當今的未上市企業,但是並未包含所有的自駕車科技。分門別類來為各位介紹自駕車及新創企業,部分內容會有重疊。
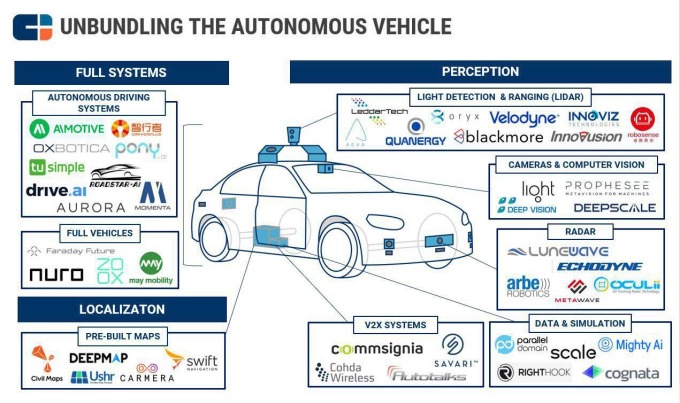
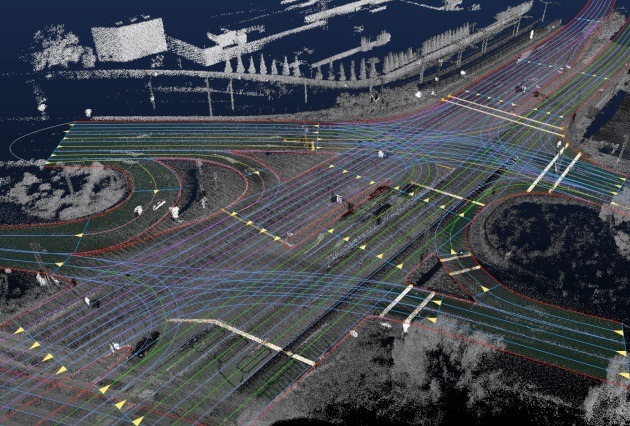
自駕車徹底剖析 圖片來源:CBINSIGHTS
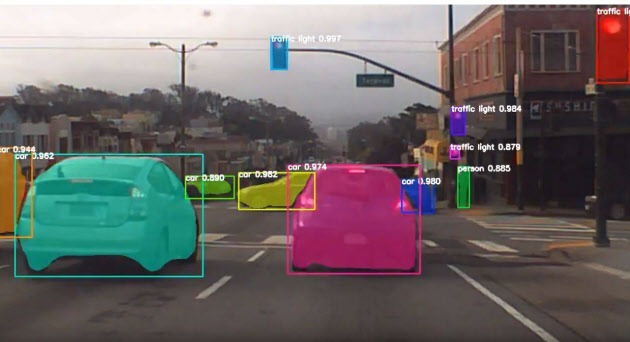
- 物體的感知 (perception)
自駕車除了需要辨識交通號誌與標誌外,其他車輛、自行車,還有行人等也都必須能夠判別。也必須能夠偵測朝著自車接近中的物體,及其距離和速度,以應付各種可能發生的狀況。
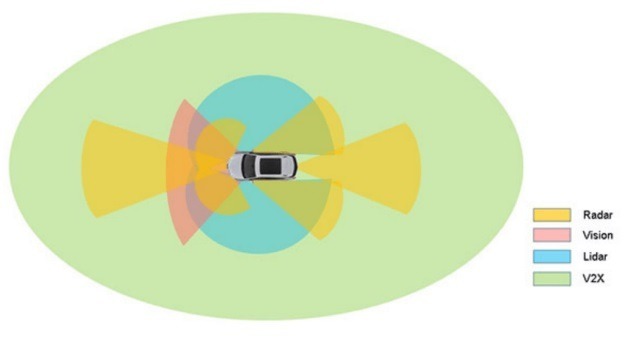
一般自駕車所使用的感測器不外乎就是攝影機、雷達、或光達 (Lidar),而這些感測器各有其長處與短處。這些感測器所蒐集到的數據透過「感測器融合」(sensor fusion) 這項技術來融合,盡可能的正確掌握車輛周遭環境。接下來,讓我們來看看他們各自的特徵在哪裡。
首先我們來看攝像機。它廣泛的使用在自駕車,與配備有先進駕駛輔助系統的車輛上。因為可以辨識顏色與字體,所以可以應用於交通標誌、號誌還有道路上標示的辨識。人的肉眼,可說不是它的對手。
許多新創企業為了開發出,能擷取更鮮明圖像的攝像機,展開激烈的競爭。今年 7 月,在 D 輪募資獲得 1.21 億萬美元的美國 Light 公司,就開發出能與光達的精度匹敵的攝像機。將 16 部攝像機所拍攝的圖像結合,擷取出極為正確的 3D 圖像。

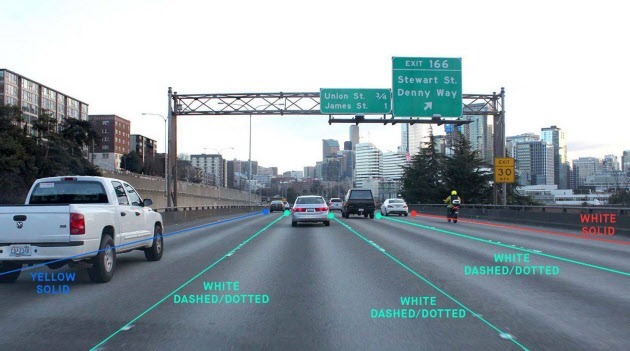
要處理攝像機擷取到的數據,需使用到電腦影像軟體。辨識車道分隔線的顏色和類別,自駕車會判斷出最適當的交通規則。
許多的新創企業正著手開發更高階、更優良的電腦影像技術。例如美國 DeepScale 等公司,為了提升辨識功能、減少誤判率,正在研發深度神經網路。法國 Prophesee 開發出,將不必要的數據減到最少,稱為「事件驅動」的機器視覺技術。Prophesee 的深度學習技術,可將人腦處理視網膜捕捉到圖像時的處理方法,以人工的方式重現。
標準的攝像機所裝載的畫格方式感測器,是同時經由每個畫素記錄下一禎圖像,然後對每禎圖像做處理。相對的,事件驅動型的感測器,則是因為畫素彼此獨立運作,將動作視為連續的情報流。與過去需要處理一連串圖像的攝像機方式相較,可減少資料量。

Prophesee 的機器視覺技術除了使用在自駕車上,也打算運用在工廠的自動化和醫療等產業。他們在 2 月的 B 輪追加輪取得 1,900 萬美元。
通常自駕車為了提升攝像機的視覺機能,也會採取雷達與光達並用的方式。自駕車使用稱為「感測器融合」(sensor fusion) 的軟體,來融合感測器所蒐集到的數據,運算出具連貫性的周遭環境圖像。
除了這種視覺感測器外,許多的新創企業和汽車製造商也著手開發使用無線通信方式,讓車輛與其他網路機器可以相互連接的「V2X」(vehicle-to-everything) 技術。
雖然這項技術還處於初期階段,將來可望運用這項技術,將車上看不見的附近車輛、自行車與行人的即時影像傳送到車上。
雷達的角色是利用發射出去的電波來檢測接近中物體的距離與速度。可檢測的距離長,比起使用旋轉式零件的光達,信賴性也比較高。理由是目前用於光達的旋轉式零件,誤判的情形較多。也因為雷達的成本較低,因此被廣泛使用。
美國 Lunewave 在 9 月時實施的種子輪融資,從德國 BMW 和中國的網路搜尋服務巨擘百度取得了 500 萬美元。他們打算利用 3D 列表機來製作檢測範圍廣、準確度高,且更為強大的天線。其技術的基礎則是源自於 1940 年代由德國人開發出的龍伯球透鏡。
美國 Metawave 也正著手研發功能更強的雷達。他們使用超材料這項人工物質,來研發可以更迅速檢測廣範圍的類比式天線。

Metawave 在 5 月實施的追加種子輪融資 (募資金額 1,000 萬美元) 中,除了 DENSO、豐田汽車、韓國現代汽車幾家大廠外,美國創投公司 Khosla Ventures 也在行列之中。Metawave 在 8 月時,對外指出,德國半導體巨擘英飛凌也有出資。
光達被認為是最尖端的感測器。其精度之高,可以繪製出車輛周遭的 3D 圖像,能用於物體的檢測。

光達使用紅外線感測器來判斷物體的距離,其原理是將雷射光的脈衝高速射出,計算測量光線反射回來的時間。
過去的光達元件為了全方位捕捉車輛的周圍環境,使用了許多的旋轉式零組件。這類組件通常成本高昂,多數情況下其可信度都比固定式零組件來的低。因此各家公司都朝著維持光達感測器精準度,並降低製造成本的方向努力。
解決方法之一,是使用半導體技術或光學技術的「固態型」光達元件來取代過去的機械部分。不需使用旋轉式零件,裝設成本也低。
以色列的新興企業 Innoviz 已開發出,可將價格壓低到數百美元的固態型光達。和美國 Velodyne LiDAR 的,使用 128 顆雷達,價格高達 7.5 萬美元的產品相比,Innoviz 的產品價格更顯得微不足道。
Innoviz 在 4 月時對外表示,他們將與 BMW 還有加拿大的零件製造商麥格納國際 (Magna International Inc.) 合作,將自家光達產品裝載在 BMW 的自駕車上。

美國 Aeva 也正著手開發固態型光達。在 10 月的 A 輪融資獲得 4,500 萬美元的挹注。根據 Aeva 的說法,他們的光達可偵測的範圍達到半徑 200 公尺,且價格也只要 200 ~ 300 美元。使用的技術也非過去在光達上所採用的脈衝方式,而是射出連續波光。
中國的速騰聚創 (Robosense) 也正進行固態型光達的研發。在 10 月實施的 C 輪融資,創下了中國光達企業單輪融資額最高紀錄,達 4,330 萬美元。而參與這輪融資的企業有,阿里巴巴集團的物流部門菜鳥網絡,汽車製造商的上海汽車集團與北京汽車集團。
V2X 技術,讓車輛與網路機器之間的無線通信成為可能。雖然目前還在初期階段,未來可望補強目前光達、雷達或是攝像機等視覺感測器的弱點。
V2X 感測器可以檢測出路上的障礙物、交通堵塞還有不斷接近中的死角。
以色列的初創企業 Autotalks 與現代汽車合作,著手 V2X 感測器技術的量產化。而韓國的三星電子,也有對 Autotalks 出資。
- 駕駛人的數據、模擬
對於開發自駕車技術而言,實際在道路上進行實車測試和模擬是不可或缺的。透過測試與模擬,來訓練指示車輛行駛的演算法。
美國蘭德公司 (RAND Corporation) 指出,為了證明自駕車的安全性,必須實施數億~ 數十億英哩的行車測試。實驗車輛為了取得這麼多里程的數據,需要花費數年的時間。因此,各家公司利用模擬的方式,來爭取時間。
著手研發模擬器的新創企業與開發自駕車的企業們,靈活運用人工智慧 (AI) 來製作及改良,用於訓練自駕車的簡易資料集 (data set)。刺眼烈日下,或從停車中的車輛後頭突然竄出的行人等,在訓練自駕車如何應變這些危險卻不常發生的狀況時,特別有用。
以色列的新創企業 Cognata 正在研發,提供自駕車在進行實驗時使用的各式場景的 3D 模擬系統。

Cognata 在 10 月實施的 B 輪融資時,從歐洲的空中巴士、以色列的創投 Maniv Mobility 等募得 1,850 萬美元。
美國半導體大廠 nVidia 在模擬器這個領域,是走在最前面的幾家大企業之一。在 5 月時,發表了運用雲端技術的模擬系統「Drive Constellation」。這個系統搭載了該公司的影像處理器 (GPU),運算並產生讓自駕系統處理的感測器數據。nVidia 可提供在數十億英哩的特別場景中,訓練自動駕駛的演算法。
nVidia 在 9 月時,將這項系統公開給 Cognata、美國 Parallel Domain、德國西門子等合作對象。
收集駕駛人數據時會產生的另一項課題就是「影像註解」(image annotation)。指的是,為了讓自駕車可以認識及辨識物體,在數據上作註解。
正研發產生學習用數據的美國初創企業 MightyAI,正與開發電腦視覺模型的企業一起著手,將註解附加在用於該公司系統的訓練用數據。MightyAI 著手中的還有數據管理、註解 (annotation) 與妥當性檢證工具。
MightyAI 在賦予意義給收集到的數據的技巧之一,是將動畫以畫素單位來分割,能夠細緻的處理圖像的「影像分割 (image segmentation)」技術。

百度也為了該公司自駕車使用的數據集,正在研發名為「ApolloScape」的影像分割軟體。
「ApolloScape」 可以將車輛、行人、自行車、大樓、路燈等,最多 26 種的圖像給予定義,讓自駕車認識可以行駛的區域,還有辨識接近中的障礙物。
- 定位 (自身車輛的位置)
自駕車為了下判斷,或是規劃行車路徑,必須先正確掌握自己的位置。
一般都是使用 GPS 的訊號來判斷,然而通常會有 1~2 公尺的誤差。以一般道路平均寬度 1.2 公尺來看,這樣的誤差距離其實過大。
因此,各家廠商運用現成的地圖或是科技,將誤差值降到 1 公尺以內。
自駕車在行走中,會將周圍的狀況與保存在車上記憶體內的數位地圖做比對。
這種高解析度地圖,比起一般導航軟體用的數位地圖要精準上許多。車道的寬度、行人穿越道、道路標誌等等,各種道路情報極為豐富。還有車子外部感測器收集到的數據,讓機能更為強化。
許多的新創企業,也都著手研發製作數位地圖時所需的硬體 (感測器等) 和軟體。
美國 DeepMap 開發了製作地圖所需的軟體,打算將這個軟體的授權賣給汽車製造商,或是開發自駕車技術的科技產業。該公司在 8 月時,自德國博世 (Bosch) 取得資金。在那之前,也獲得美國創投公司 Andreessen Horowitz 與 Accel Partners 的資金。

美國 Civil Maps 也開發針對完全自駕車市場,開發 3D 地圖的製作技術。將感測器收集到的原始數據,運用 AI 技術,在地圖情報上加工。
也有企業是為了販售資料,著手開發高解析度地圖。
在 Mapping 這個產業裡,有美國的 HERE Maps 和荷蘭的 TomTom 兩大公司。Here Maps 在 2015 年 12 月時,被德國的汽車公司聯盟 (Audi, BMW, Daimler) 買下。TomTom 則是為了將他們所擁有的歐美地圖,與百度所擁有中國地圖做整合,於今年 1 月與百度建立合作關係。
美國的 Google 公司,在這個領域也有卓越的進步。瑞典的富豪汽車在 10 月時,也表明地圖系統將由 TomTom 改成 Google 的方針。Google 的自駕部門 Waymo,也利用在實驗及驗證時取得的數據,開發獨自的高解析度地圖。
百度正在開發自駕車用軟體「Apollo」所使用的高解析度地圖。打算將這個地圖賣給汽車製造商來收取服務費,或是將地圖的使用費用含在車價內,藉以獲取收益。百度的高解析度地圖事業,有朝一日可望會超越他們目前在中國最大的搜尋引擎事業。
- 全系統
不針對特定零組件,而是著手研發整套自駕系統的企業也有很多。
這些企業大多數都是特別強化自動駕駛技術,與汽車製造商一同攜手研發。此外,有極少數的企業選擇包含車體在內的全車研發。
- 自駕系統
多數進行全系統研發的企業,把電腦影像與感測器融合軟體,及自動駕駛所需硬體成套販售。這種類型的系統,就如同汽車的頭腦一樣。
通常在這個領域的新創企業,會與汽車製造商合作,並展開獨自的技術。部份情況下,事後在車上加裝自駕車技術也是有可能的。
例如,美國的 Drive.ai , 就有著手開發活用該公司自駕系統軟體的改裝套件。在德州的 Frisco 進行數個月的實際測試後,在 10 月時,這項服務也擴大到德州的 Arlington。
Drive.ai 在 2017 年 9 月,與美國大型共乘服務公司 Lyft 合作。將他們的自駕系統置入 Lyft 的開放原始碼軟體中,共同研發出自駕車。

中國企業也正進行自駕系統的開發
研發據點設在北京的 Momenta (初速度科技) 於 10 月時,在 C 輪募資從電動車製造商 NIO 、騰訊獲得資金挹注,成為獨角獸新創公司 (估值超過 10 億美元的未上市公司)。Momenta 與蘇州市合作,展開大規模的實車測試,並且在蘇州市裏建構智慧交通系統。
Pony.ai(小馬智行) 也是另一個獨角獸公司。他們為了展開自駕系統研發,與中國第二大汽車公司,廣州汽車合作。在 A 輪募資取得 1 億 200 萬美元的資金後,僅在 3 個月後的 9 月時,在廣州成功展開自駕車的測試。
- 車體也是自行研發
Zoox、Nuro,這類公司則是進行自駕車的整車研發。
Zoox 的概念車與傳統的汽車不同,沒有方向盤與儀表板,車內採長型座椅面對面的配置方式。

Zoox 還未取得道路行駛許可,目前使用 TOYOTA 的大型休旅車 Highlander 來進行技術上的測試。
Zoox 的特殊設計抓住了投資人的目光,也因共同創辦人兼 CEO 的閃電卸任,媒體曝光率也很高。
Zoox 在 7 月的 B 輪募資時,企業價值被估計為 32 億美元,募得了 5 億美元。累計募資額達到 8 億美元。計畫在 2020 年時,展開自駕車載客服務。
Nuro 的自駕車被設計為載貨專用,解決讓零售業者頭痛的最後一哩商品配送問題。

【往下看更多】
►媽媽們領錢了! 1條件「每月補助1萬」 最高可拿9萬
►3歲童衝出來拉不住? 騎士撞上「母索賠20萬」 監視器戳破謊言
►台灣大廠發重訊!「股票分割」1股10元變2.5元
【熱門排行榜】
►謝大甲媽佑母開刀順利 兒從澎湖飛台千里還願
►金價創最大跌幅!富國證券看好「明年飆8000美元」
►遺囑寫給你就萬無一失? 她眼睜睜看「看護變繼母」搬走千萬遺產
推薦閱讀











